I'm new here. I'm not a native speaker, so pardon my English.
I just received my Arduino Leonardo today. I tried some basic calculations and stuff like blinking and LCD interfacing. Its interesting.
I am now trying to make a tachometer with the Leonardo. I'm following this tutorial.
I guess the board they've used differs from the Arduino Leonardo (ie pin 3 is interrupt0 in the Leonardo but it is pin 2 in the Arduino Uno board used in the tutorial). I tried changing the pins on the program and reconnecting the circuit but it doesn't work.
This is the code from the tutorial:
/* Optical Tachometer
*
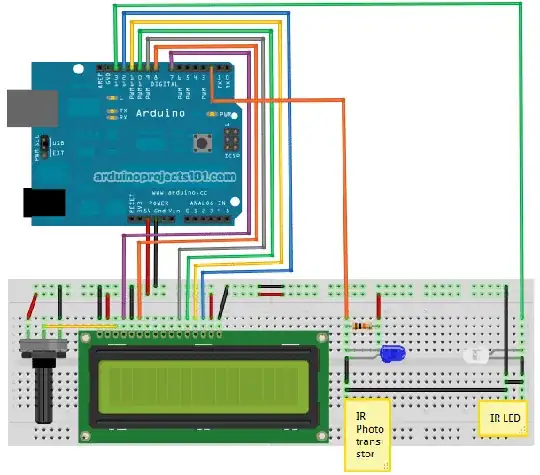
* Uses an IR LED and IR phototransistor to implement an optical tachometer.
* The IR LED is connected to pin 13 and ran continually.
* Pin 3 (interrupt 0) is connected across the IR detector.
*
* Code based on: www.instructables.com/id/Arduino-Based-Optical-Tachometer/
* Coded by: arduinoprojects101.com
*/
int ledPin = 13; // IR LED connected to digital pin 13
volatile byte rpmcount;
unsigned int rpm;
unsigned long timeold;
// include the library code:
#include <LiquidCrystal.h>
// initialize the library with the numbers of the interface pins
LiquidCrystal lcd(7, 8, 9, 10, 11, 12);
void rpm_fun() {
//Each rotation, this interrupt function is run twice,
//so take that into consideration for calculating RPM
//Update count
rpmcount++;
}
void setup() {
lcd.begin(16, 2); // intialise the LCD
//Interrupt 0 is digital pin 2, so that is where the IR detector is connected
//Triggers on FALLING (change from HIGH to LOW)
attachInterrupt(0, rpm_fun, FALLING);
//Turn on IR LED
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, HIGH);
rpmcount = 0;
rpm = 0;
timeold = 0;
}
void loop() {
//Update RPM every second
delay(1000);
//Don't process interrupts during calculations
detachInterrupt(0);
//Note that this would be 60*1000/(millis() - timeold)*rpmcount if the interrupt
//happened once per revolution instead of twice. Other multiples could be used
//for multi-bladed propellers or fans
rpm = 30*1000/(millis() - timeold)*rpmcount;
timeold = millis();
rpmcount = 0;
//Print out result to LCD
lcd.clear();
lcd.print("RPM=");
lcd.print(rpm);
//Restart the interrupt processing
attachInterrupt(0, rpm_fun, FALLING);
}
Can anyone help me to fix the project? Has anyone here tried this project before?
Thank you!
