A plane is a mathematical entity which satisfies the following equation:
Where n is the normal, and a is any point on the plane (in this case the center point as above). It makes no sense to "rotate" this equation - if you want the plane to face a certain direction, just make the normal equal to that direction (i.e. the "mentioned" vector).
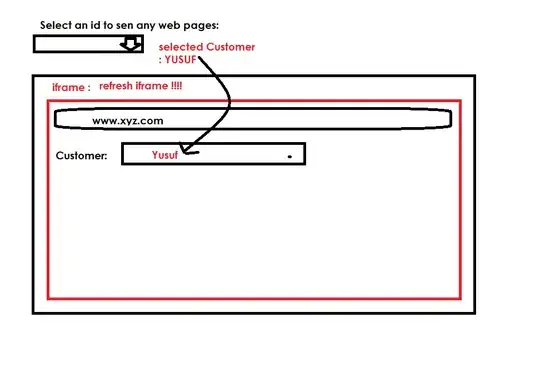
You later mentioned in the comments that the "plane" is an OpenGL quad, in which case you can use Quaternions to compute the rotation.
This Stackoverflow post tells you how to compute the rotation quaternion from your current normal vector to the "mentioned" vector. This site tells you how to convert a quaternion into a rotation matrix (whose dimensions are 3x3).
Let's suppose the center point is called q, and that the rotation matrix you obtain has the following form:
This can only rotate geometry about the origin. A rotation about a general point requires a 4x4 matrix (what OpenGL uses), which can be constructed as follows: